And here's ChatGPT showing me up, again...
Absolutely, Patrick.
The primary purpose of the knee is to enable bending around its hinge, typically backward and then forward again, up to a straight position. Its direction of movement depends significantly on the hip rotation and the position of the upper leg. This functionality allows us to walk, crouch, and perform other motions. Another critical role of the knee is shock absorption.
Apologies for the lateness of this post. Initially, I was focused on drawing the knee-related aspects, but I realized that it would be more comprehensive to include a comparison of a 3D being rotating a 4D object against a 2D being rotating a 3D object (like our Earth). As such, I’ve set aside the knee drawings for now.
Moving on to the ComparisonLet’s explore a comparison between:
1. A 2D being moving a 3D object (our Earth) sideways through their 2D space.
2. Us (3D beings) moving a 4D object ana-kata through our 3D space.
The object in question is a glome, which is the 4D equivalent of a 3D sphere or a 2D circle. A glome has an equal radius from its center to its surface in all 4D directions.
Parallel Slicing 2D & 3D Parallel Slicing
2D & 3D Parallel SlicingLeft: Our spherical Earth creates circular slices when viewed from the perspective of a 2D being as it moves through their plane.
Right: Similarly, a glome creates spherical slices in our 3D space as it passes through.
In both scenarios, the slices diminish in size the farther we move away from the center of the object (as shown to the right in each example). Once the object completely exits the lower-dimensional space, it disappears.
Rotational Slicing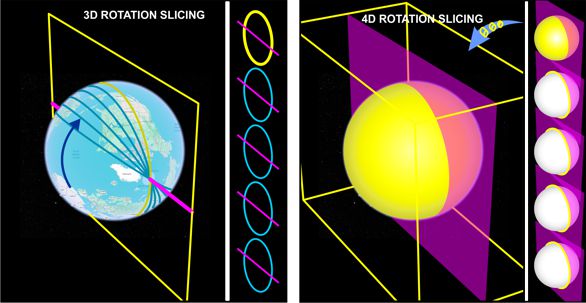 2D & 3D Rotated Slicing
2D & 3D Rotated SlicingLeft: For the 2D being, a rotating 3D sphere appears as a sequence of circular slices around a 2D axis (illustrated as a pink line).
Right: For us, a rotating glome appears as a series of spherical slices around a 3D axis (illustrated as a pink rectangle).
In both cases, the slices maintain their full size during rotation, making this concept easier to grasp.
To a 2D being, a sphere is understood as a circle of circles spinning into an additional dimension.
Similarly, to us, a glome is perceived as a circle of spheres spinning into one more dimension.
Comparing the Axis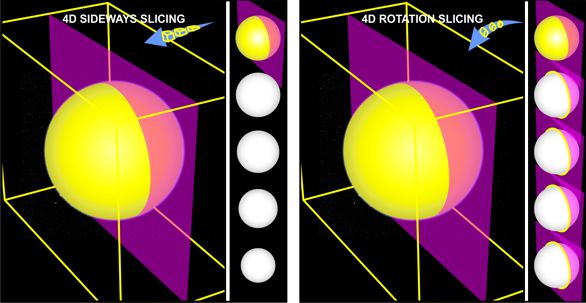
When we push an object through a lower-dimensional space, the axis only appears momentarily. However, when rotating, the axis remains visible throughout the entire rotation.
For a 2D being, the rotating line axis of a 3D object is always visible.
For us, the rotating plane axis of a 4D object (the glome) remains visible throughout its rotation.
Interestingly, the axis is consistent throughout the rotation, but it appears differently depending on the angle.
For a 2D being, a line axis pointing directly at them will always seem to face them, even as it rotates.
Similarly, for us, the plane axis of a glome remains consistent, though its orientation shifts as the glome rotates.
This demonstrates that the 2D line axis and the 3D plane axis (or axle) serve the same purpose in their respective contexts, remaining constant across every angle of rotation.
Pretty fascinating, right? Next, let’s dive into how these concepts apply to a 4D being’s knee!
 Legs 360 B.jpg
Legs 360 B.jpg

