gonegahgah wrote:I realise, looking at this again, that there is definitely one error to correct so far...
I'll try changing the equations tomorrow to:
x(u,v,s,t) = (R + r * cos(s) * (sin(v / 2) * sin(u + t) * cos(t) * -sin(v/2) + cos(u + t) * cos(v / 2))) * sin(v * cos(s * cos(t)))
y(u,v,s,t) = (R + r *cos(s) * (sin(v / 2) * sin(u + t) * cos(t) * -sin(v/2) + cos(u + t) * cos(v / 2))) * cos(v * cos(s * cos(t)))
z(u,v,s,t) = r * cos(s) * (sin(v / 2) * sin(u + t) * cos(t) * cos(v/2) + cos(u + t) * sin(v / 2))
What is "s" there?
In case it helps, these should be the parametric equations for the whole objects:
90°-Moebius-spheritorus:
x = sin(u)*(R + t*sin(v))
y = cos(u)*(R + t*sin(v))
z = t*cos(u/2)*cos(v)
w = t*sin(u/2)*cos(v)
0°-Moebius-spheritorus:
x = sin(u)*(R + t*sin(u/2)*sin(v))
y = cos(u)*(R + t*sin(u/2)*sin(v))
z = t*cos(u/2)*sin(v)
w = t*cos(v)
u, v = [0, 2pi]
w = [0, r]
gonegahgah wrote:Awesome Teragon. I'm pleased to hear that you are also making this for our solid objects in 4D! I look forward to seeing that
.
You have to be patient though. It's something I'm gonna spend some time on now and then, so it's going to take a longer timespan.
gonegahgah wrote:Maybe one day you can also help me to create a program to show 4D objects using my rotated projection model. That's something I hope to make one day.
Oh I hope so. Do you think the mathemtical part or the programming part is gonna be more difficult for you?
gonegahgah wrote:These colour versions make clearer sense to me now, cool! I guess that is the process of my brain adapting to new models?
Sure. You're learning to orient yourself in this new world

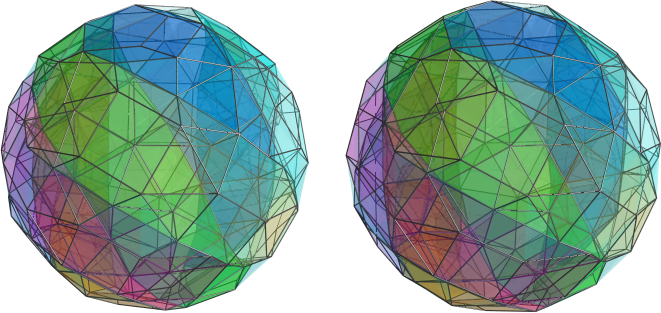
Considering the animation of the 3D Klein strip in 4D I think it's much easier to get it right and internalize it using an actual 3D image. Are you familiar with the cross-eyed-view?
It's just a matter of practice. You are squinting at the pictures, a bit like you wanted to look at your nose, or like looking through everthing, so you see both images twice. You vary the degree your eyes cross, until the inner two images are congruent. Then you can easily focus onto this new image in the center and it's gonna be in 3D.
I did a rotation in the wz-plane as well (it's a bit more tricky to see the flips here):
gonegahgah wrote:Teragon wrote:The 90°-object is the more symmetric one, as all the directions the surface normal points at look identical. The surface normal is always pointing ouside of the loop. It just came to me that this means that you could rotate the object in the plane of the loop by some angle, then rotate it by the same angle in the plane perpendicular to the plane of the loop and retain the exact same shape! That means in the same way a torus has a rotational symmetry (=invariance under rotations), the 90°-Moebius-Spheritorus has a double-rotational symmetry (=invariance under double rotations).
I might need you to explain this a bit more please Teragon.
Which are the concepts here you don't understand?

















 I was just making an apology above...
I was just making an apology above...




 [XXX WRONG XXX]
[XXX WRONG XXX] [XXX WRONG XXX]
[XXX WRONG XXX]






 Couldn't find what caused the error, so I can't plot it at the moment. I also can't figure out the logics of your equations. The u- and v-direction are obviously not perpendicular to each other, which is inelegant at best. What I'd come up with would be the following:
Couldn't find what caused the error, so I can't plot it at the moment. I also can't figure out the logics of your equations. The u- and v-direction are obviously not perpendicular to each other, which is inelegant at best. What I'd come up with would be the following: